
Kit de démarrage
Vous êtes à quelques étapes de contrôler un robot humanoïde.
Étape 2 Configurez le RaspBerry Pi
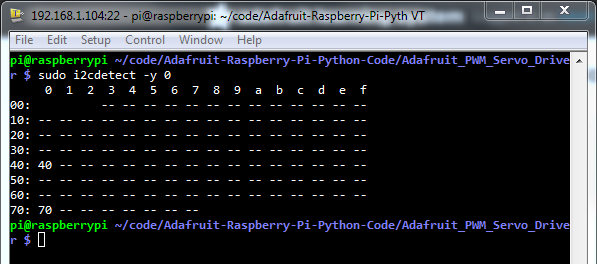 Image source : Adafruit.com
Image source : Adafruit.com
Étape 3 Configurez Adafruit 16-Channel PWM/Servo HAT
- Installiez le support du noyau avec Raspi-Config
- Testez la configuration
- Dans le terminal, entrez la commande : sudo i2cdetect -y 1
Étape 4 Synchronisation avec notre GitHub
- Dans le terminal, entrez les commandes :
- sudo apt-get install git (installer le client git du terminal)
- cd (Aller dans le dossier home)
- mkdir RasPiBot_GitHub (créer un dossier)
- cd RasPiBot_GitHub (Aller dans le dossier RasPiBot_GitHub)
- git clone https://github.com/RasPiBot/RasPiBot.git (Télécharger la librairie de GitHub)
- cd RasPiBot(Accéder au dossier)
- python RasPiBot.py(Faire bouger la tête du robot)
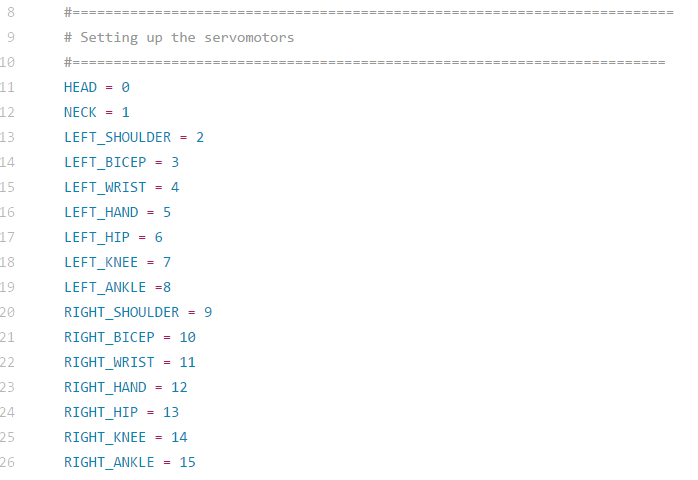
Étape 5 Le fun commence, c'est le temps de programmer!!!!
- sudo nano RasPiBot.py (Appuyer sur la flèche du bas jusqu'à la dernière ligne)
Le code démo est simple. Nous instancions un robot :
robot = RasPiBot()
Nous appelons une rotation sur la tête.
robot.Rotate(RasPiBot.NECK,10)
Attendre 2 secondes.
time.sleep(2)
Rotation inverse de la tête.
robot.Rotate(RasPiBot.NECK,-10)
Vous pouvez maintenant commencer à vous amuser avec vos projets personnes. Consultez nos nouveaux tutoriels dans la section ressources. N'hésitez pas à partager votre code et vos créations avec la communauté.